
Idrofonia in Italia (1940 - 2000 )

L' idrofonia in Italia [N 1] si è sviluppata iniziando, nella sua evoluzione, con l'idrofono cavo,[N 2]del periodo precedente alla seconda guerra mondiale, a seguire con gli apparati idrofonici della Ditta SAFAR, successivamente i sonar per i sottomarini classi Toti e Sauro]] e agli apparati di ultima generazione installati sui sottomarini U212 [1] in servizio nel XXI secolo.
Gli apparati italiani per l'idrofonia erano nominati Impianti idrofonici o ecoidrofonici in base al tipo di localizzazione, o tramite il rumore emesso dal bersaglio i primi o tramite l'eco riflesso da questi il secondo.
La dizione sonar viene introdotta nel gergo soltanto dopo la fine della seconda guerra mondiale.
La prima applicazione
[modifica]Si ha notizia, dopo la fine della seconda guerra mondiale, della prima applicazione dell'idrofonia in Italia, con i reperti presenti nel Museo Navale di La Spezia [2] il ricevitore idrofonico direzionale.
Ricevitore idrofonico rivelatore
[modifica]
Il ricevitore idrofonico rivelatore[3] era formato da una sfera cava di gomma collegata ad un tubo di metallo che terminava con un leggero condotto di gomma da applicare all’orecchio dell’operatore. La sfera di gomma veniva immersa in mare alla profondità di qualche metro, le onde sonore che ne colpivano la superficie provocavano delle vibrazioni che si trasmettevano direttamente all’aria in essa contenuta e da questa, tramite il tubo metallico ed il condotto di gomma venivano convogliate all'orecchio dell’operatore che scopriva, se presente, il rumore di un semovente in mare navigante su qualsiasi possibile angolazione dell’orizzonte.
Si concretizzava quindi la scoperta, ma non la localizzazione del semovente.
Ricevitore idrofonico direzionale
[modifica]L’operazione di scoperta della direzione del semovente si è realizzata con un dispositivo simile al precedente, ma dotato di due sfere cave.
L’ascolto avveniva in modo stereofonico, con i contributi acustici delle due sfere, una per ciascun orecchio, e si puntava la sorgente acustica ruotando manualmente il supporto, così come nell'ascoltare un rumore in aria si ruota la testa per individuarne il settore di provenienza[4].
Questo sistema di scoperta direzionale presentava ambiguità dato che quando la coppia di sfere individuava il bersaglio questo poteva essere tanto da un lato quanto dal lato opposto.
Primi passi dell'evoluzione
[modifica]Elementi idrofonici elettroacustici
[modifica]
Con la costruzione di elementi idrofonici in grado di trasformare le vibrazioni acustiche in tensioni elettriche[N 3][5] le sfere cave venivano sostituite da insiemi di quest'ultimi, basi acustiche ruotanti, da movimentare in mare per la scoperta dei bersagli. Isolando acusticamente un lato dell'insieme si consentiva l'ascolto soltanto nella direzione voluta senza ambiguità; la scoperta era fattibile per bersagli relativamente vicini.
L'evoluzione con valvole termoioniche
[modifica]Con l'impiego delle valvole termoioniche[6] vengono sviluppati i primi apparati in grado di scoprire i bersagli a notevoli distanze.
Il principio di rivelazione dei bersagli resta sempre quello indicato come base ruotante. L'operatore nel locale operativo ruota con un volantino la base esterna al sommergibile e con l'ascolto in cuffia cerca i bersagli per determinarne, su apposito indicatore numerico, la posizione angolare rispetto all'asse del battello.
-
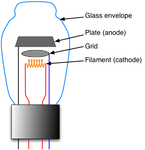 Siluette valvola termoionica
Siluette valvola termoionica -
 Ricevitore idrofonico ruotante sul sommergibile
Ricevitore idrofonico ruotante sul sommergibile


Apparati idrofonici particolari
[modifica]Nel periodo della seconda guerra mondiale, la ditta SAFAR ha prodotto due apparati idrofonici a valvole termoioniche.[7]
Impianto di segnalazione subacquea per sommergibili (1939)
[modifica]
L’impianto di segnalazione acustica subacquea è un complesso di dispositivi che permettono la trasmissione e la ricezione di segnali acustici telegrafici che si propagano in mare.
A mezzo di apposito trasmettitore, con trasduttore annesso che opera anche come ricevitore, vengono prodotte onde acustiche di frequenza determinata di durata e ritmo variabili a comando manuale. Un impianto analogo riceve i segnali acustici tramite il proprio trasduttore e li rende udibili con cuffia telefonica all'operatore.

Si tratta di un dispositivo di comunicazioni tra mezzi navali descritto nel fascicolo monografico originale della SAFAR[8]
Fonoscandaglio tipo R (1940)
[modifica]Il fonoscandaglio Safar tipo R è un apparecchio che, installato a bordo di unità subacquea o di superficie, permette di scandagliare il fondo del mare, cioè di misurare la profondità nel punto in cui si trova il semovente navale
Lo scandaglio, descritto nel fascicolo monografico [8], è formato da due trasduttori, di ricezione e trasmissione, da un cofano con l'amplificatore e il rivelatore dei segnali, da un trasmettitore e da un indicatore numerico della profondità.
Idrofonia con basi d'ascolto fisse
[modifica]Con l'impiego dei tubi a raggi catodici [9] , e particolari basi idrofoniche fisse, si sviluppano i primi apparati ecoidrofonici nei quali sullo schermo dei tubi catodici si evidenziano, con marche luminose, le posizioni angolari dei bersagli.
- Apparato ecoidrofonico con schermo a raggi catodici.
-
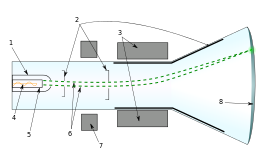 Siluette tubo a raggi catodici
Siluette tubo a raggi catodici -
 Ricevitore idrofonico con base fissa
Ricevitore idrofonico con base fissa


I bersagli localizzabili con questi tipi di apparati erano visualizzati all'operatore al sonar su di una consolle di presentazione e controllo dotata di schermo circolare video. Se un sottomarino in fase di scoperta si trova in immersione in una zona di mare, tra coste ed isole, nella quale sono presenti due navi in movimento può esplorare l'ambiente nell'intento di localizzare tanto i bersagli fissi quanto in movimento. Dato che tutti i rilievi angolari del sonar sono effettuati facendo riferimento al sottomarino, esso diventa il centro della geometria della zona. Tracciato un cerchio ideale facendo centro sul sottomarino, tutto ciò che in esso è compreso sarà visualizzato sullo schermo circolare di presentazione con riferimento al punto centrale.
- Immagini della geometria e presentazione video dei bersagli apparato ecoidrofonico
-
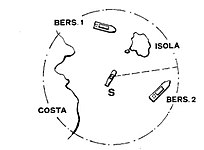 Geometria del campo di mare esplorato
Geometria del campo di mare esplorato -
 Sullo schermo: a sinistra, echi dei bersagli, a destra rumore emesso dai bersagli.
Sullo schermo: a sinistra, echi dei bersagli, a destra rumore emesso dai bersagli.


Nello schermo del sonar compaiono tracce diverse in dipendenza del suo modo operativo. Se si lavora in attivo gli echi di tutti i bersagli compaiono sullo schermo sotto forma di piccoli segmenti luminosi che delineano la topografia della zona circostante il battello, questo compare come un punto luminoso al centro. Un raggio luminoso è fatto ruotare dall'operatore per collimare i bersagli.
Se il sonar lavora in passivo, i rumori irradiati dai bersagli compaiono sullo schermo sotto forma di tracce radiali che indicano la direzione di provenienza del suono rispetto al battello che compare come un punto luminoso al centro. Anche in questo caso è presente l’indice luminoso per collimare i bersagli.
L'idrofonia dopo la seconda guerra mondiale
[modifica]Gli studi sull'idrofonia riprendono in USEA [10](La Spezia) nel 1951, sono indirizzati alla costruzione dei primi apparati ecoidrofonici del dopoguerra per navi di superficie e sottomarini.
Impianto ecoidrofonico P51
[modifica]Si trattava di un impianto ecoidrofonico sperimentale per navi di superficie; progettato e realizzato nel 1951 dalla Soc. Usea in Lerici (SP).[11]
Impianto ecoidrofonico IP60/64
[modifica]
È il primo apparato ecoidrofonico per sottomarini [12] costruito in Italia; realizzato nel 1960 dalla Soc. Usea in Lerici (SP) per i battelli Classe Toti.
Caratteristiche:
- Presentazione video in coordinate polari[N 4]
- Ricezione con 36 fasci preformati in alta frequenza[N 5] (uno ogni ° ) impiegato prevalentemente alla scoperta dei bersagli con il metodo dell'eco[N 6]

- Arco d'orizzonte esplorato: °

- Intensità d'illuminazione delle tracce dipendente dalle ampiezze dei segnali generate dai fasci preformati.
Tecnologia
- Trasduttori magnetostrittivi per l'emissione degli impulsi.
- Idrofoni piezoelettrici per la ricezione degli echi e/o del rumore emesso dai bersagli.
- Valvole termoioniche per la generazione degli impulsi acustici.
- Semiconduttori per l'elettronica di conduzione e di processo.
Impianto ecoidrofonico IP70
[modifica]
È il secondo apparato ecoidrofonico[13] per sottomarini costruito in Italia; realizzato nel 1970 dalla Soc. Usea in Lerici (SP) per i battelli Classe Sauro.
Caratteristiche:
- Presentazione video in coordinate polari[N 4]
- Ascolto in bassa frequenza con fasci preformati [N 7](uno ogni ° per una copertura di °)[N 8], in alta frequenza 36 fasci preformati[N 9] (uno ogni °)[N 10]



- Due posti di osservazione
- Arco d'orizzonte esplorato: °
- Intensità d'illuminazione delle tracce dipendente dalle ampiezze dei segnali generate dai fasci preformati.
Tecnologia:
- Trasduttori piezoelettrici per l'emissione degli impulsi.
- Idrofoni piezoelettrici per la ricezione degli echi e/o del rumore emesso dai bersagli.
- Valvole termoioniche per la generazione degli impulsi acustici.
- Valvole termoioniche per la presentazione video.
- Semiconduttori per l'elettronica di conduzione e di processo.
Impianto ecoidrofonico IP74
[modifica]

È il terzo apparato ecoidrofonico [14] per sottomarini costruito in Italia; realizzato nel 1974 dalla Soc. Usea in Lerici (SP) per i battelli Classe Sauro.
- Questo apparato consentiva, con i fasci preformati, la scoperta veloce dei bersagli che, una volta individuati, potevano essere localizzati con notevole precisione da un compensatore meccanico ausiliario indirizzabile velocemente nella direzione voluta.
Caratteristiche:
- Presentazione video a cascata in coordinate angolo - tempo.
- Ascolto in bassa frequenza a fasci preformati[N 11](uno ogni ° per una copertura di °)[N 12], in alta frequenza fasci preformati[N 13] (uno ogni °)[N 14]
- In ascisse l'arco d'orizzonte esplorato: °
- In ordinate il tempo trascorso con le tracce delle evoluzioni dei bersagli per memoria tattica.
- Intensità d'illuminazione delle tracce dipendente dalle ampiezze dei segnali generate dai fasci preformati.
- Questo apparato consentiva la localizzazione di precisione con un compensatore ausiliario così come nell'impianto ecoidrofonico IP70.


Tecnologia:
- Trasduttori piezoelettrici per l'emissione degli impulsi.
- Idrofoni piezoelettrici per la ricezione degli echi e/o del rumore emesso dai bersagli.
- Valvole termoioniche per la generazione degli impulsi acustici.
- Circuiti integrati per la presentazione video.
- Semiconduttori per l'elettronica di conduzione e di processo.
- Computer ESA24 - ELSAG (Ge) per l'elaborazione dati, presentazione video, conduzione dell'impianto.
Impianto idrofonico FALCON
[modifica]Si tratta del terzo apparato, di tipo esclusivamente idrofonico [15], progettato e costruito in Italia in via prototipica, presso l'Arsenale Militare di La Spezia nel 2000 come apparato d'emergenza per i sottomarini classe Sauro Sonar di emergenza FALCON - Wikiversità.
- Presentazione della traccia dei bersagli secondo coordinate cartesiane[N 16]
- Sonar d'emergenza a fasci preformati in bassa frequenza[N 17] (uno ogni ), studiato per i sottomarini Classi Toti e Sauro, da impiegare con la base idrofonica cilindrica a proravia del sottomarino:

In ascisse l'arco d'orizzonte esplorato: °

In ordinate le ampiezze dei segnali generate dai fasci preformati.
Tecnologia:
- Base acustica ricevente del sottomarino ospitante.
- Circuiti integrati per l'elettronica di amplificazione e interfaccia con il P.C.
- Computer portatile di serie per l'elaborazione dei segnali idrofonici, formazione dei fasci di scoperta, presentazione dei dati e puntamento del bersaglio.
- Immagini della geometria e presentazione video dei bersagli apparato idrofonico
-
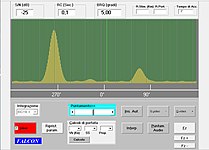 Presentazione panoramica tipo A del FALCON -Elaborazione numerica-
Presentazione panoramica tipo A del FALCON -Elaborazione numerica- -
 Impianto idrofonico prototipico FALCON
Impianto idrofonico prototipico FALCON


Note
[modifica]- Annotazioni
- ↑ L'idrofonia è la tecnica per la trasmissione, la ricezione e l'ascolto dei segnali acustici in acqua
- ↑ Sorta di stetoscopio adattato all'ambiente subacqueo
- ↑ Idrofoni realizzati con materiali piezoelettrici
- ↑ 4,0 4,1 Indicata come PPI, acronimo inglese per Plan-Position Indicator)
- ↑ Banda di ricezione
- ↑ Per la scoperta si impiegava la base idrofonica cilindrica a proravia del sottomarino.
- ↑ Banda di ricezione
- ↑ Per la scoperta in bassa frequenza si impiegava la base idrofonica conforme che nel settore prodiero, coperta dallo scafo, non consentiva un'esplorazione totale di °)
- ↑ Banda di ricezione
- ↑ Per la scoperta in alta frequenza si impiegava la base idrofonica cilindrica a proravia del sottomarino.
- ↑ Banda di ricezione
- ↑ Per la scoperta in bassa frequenza si impiegava la base idrofonica conforme che nel settore prodiero, coperta dallo scafo, non consentiva un'esplorazione totale di °)
- ↑ Banda di ricezione
- ↑ Per la scoperta in alta frequenza si impiegava la base idrofonica cilindrica a proravia del sottomarino.
- ↑ Questo apparato è stato studiato e realizzato presso L'Arsenale Militare di La Spezia come localizzatore d'emergenza.
- ↑ Indicata con la sigla tipo A
- ↑ Banda di ricezione





- Fonti
- ↑ SonarU212.
- ↑ museo.
- ↑ C. Del Turco, pp. 36 - 40.
- ↑ parodi, pp. 6 - 13.
- ↑ Pazienza, pp. 223 - 258.
- ↑ Geppert, pp. 86 - 127.
- ↑ safar.
- ↑ 8,0 8,1 safar, monografia.
- ↑ Geppert, pp. 181 - 217.
- ↑ USEA.
- ↑ P51.
- ↑ Sonar Toti.
- ↑ Sonar IP70.
- ↑ sonar IP70S Sauro.
- ↑ Sonar FALCON.
- ↑ Del Turco, Monografia.
Bibliografia
[modifica]- M.M.I, Museo Navale di La Spezia.
- C. Del Turco, Sonar- Principi - Tecnologie – Applicazioni, Tip. Moderna La Spezia, 1992.
- M.Parodi, Principes Reception sous-marine dirige, I.T.A - Parigi 1946.
- Giuseppe Pazienza, Fondamenti della localizzazione marina, La Spezia, Studio grafico Restani, 1970, pp. 394 – 460.
- D.v. Geppert, Basic Electron Tubes Mc GRAW-HILL New York 1951.
- Soc. SAFAR, fonoscandaglio/Segnalatore subacqueo, 1939/1940.
- Soc. USEA, Monografia Apparato IPD70 Archivio Off. Ea. Arsenale. M.M.I La Spezia, 1972.
- Soc. USEA, Monografia Apparato ecogoniometrico P51 Archivio Off. Ea. Arsenale. M.M.I La Spezia, 1952.
Collegamenti interni
[modifica]- Wikiversity, Sonar per sottomarini U212.
- C. Del Turco, Doc. Soc. USEA, Spezia.
- Wikiversity, Sonar IP64.
- Wikiversity, Sonar IP70S.
- Wikiversity, Sonar FALCON.
- Archivio Direzione Arsenale M.M. La Spezia, 2000 C. Del Turco, Sonar d'emergenza FALCON.
Collegamenti esterni
[modifica]Testo tecnico sulla Correlazione